Mimicking Robotic Arm [2023]
Summary and Key Details
Designed a robotic arm that replicates the real-time movements of a manually controlled arm
Obtained a 3:1 strength-to-weight ratio while accurately mimicking the secondary arm
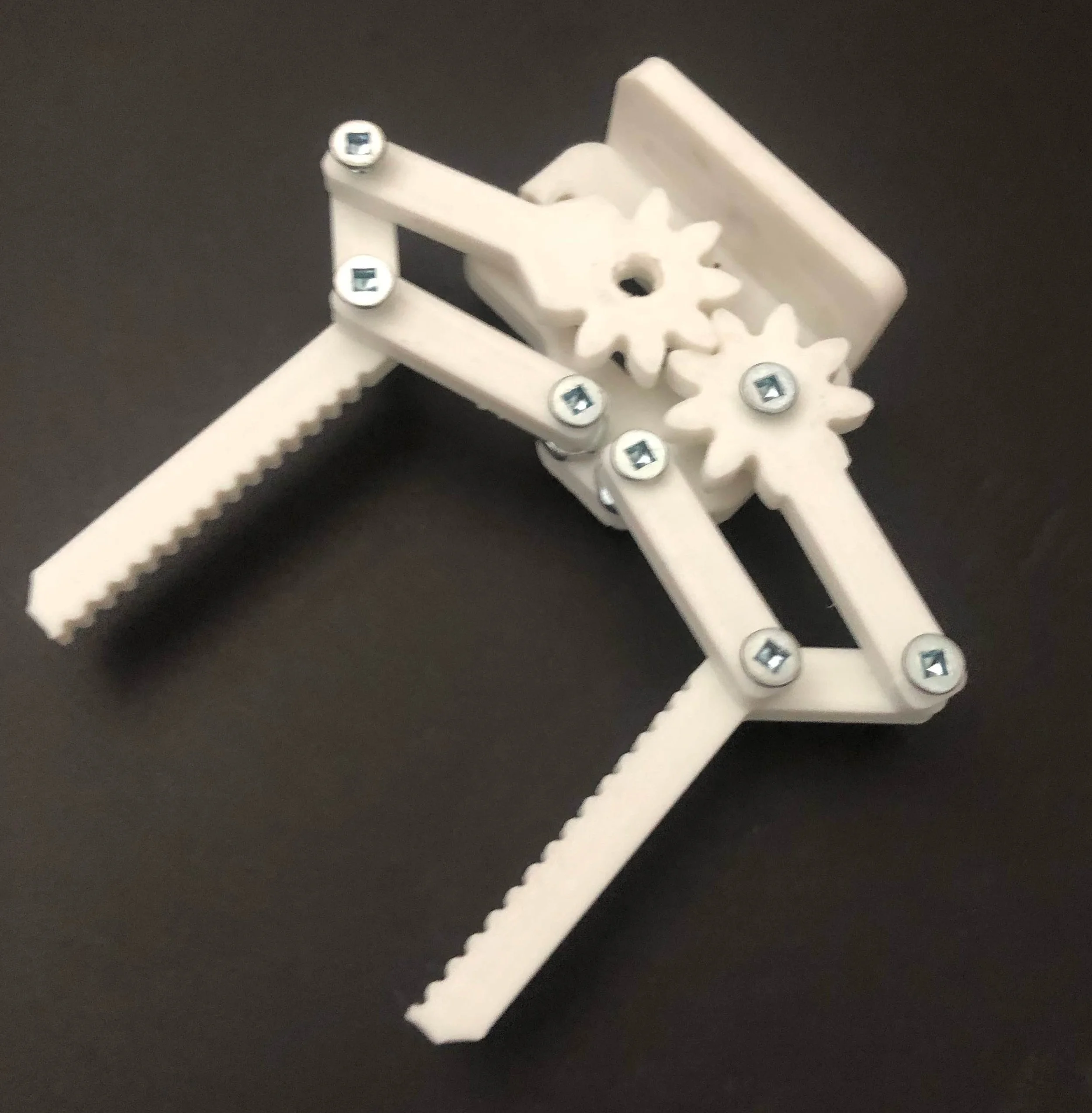
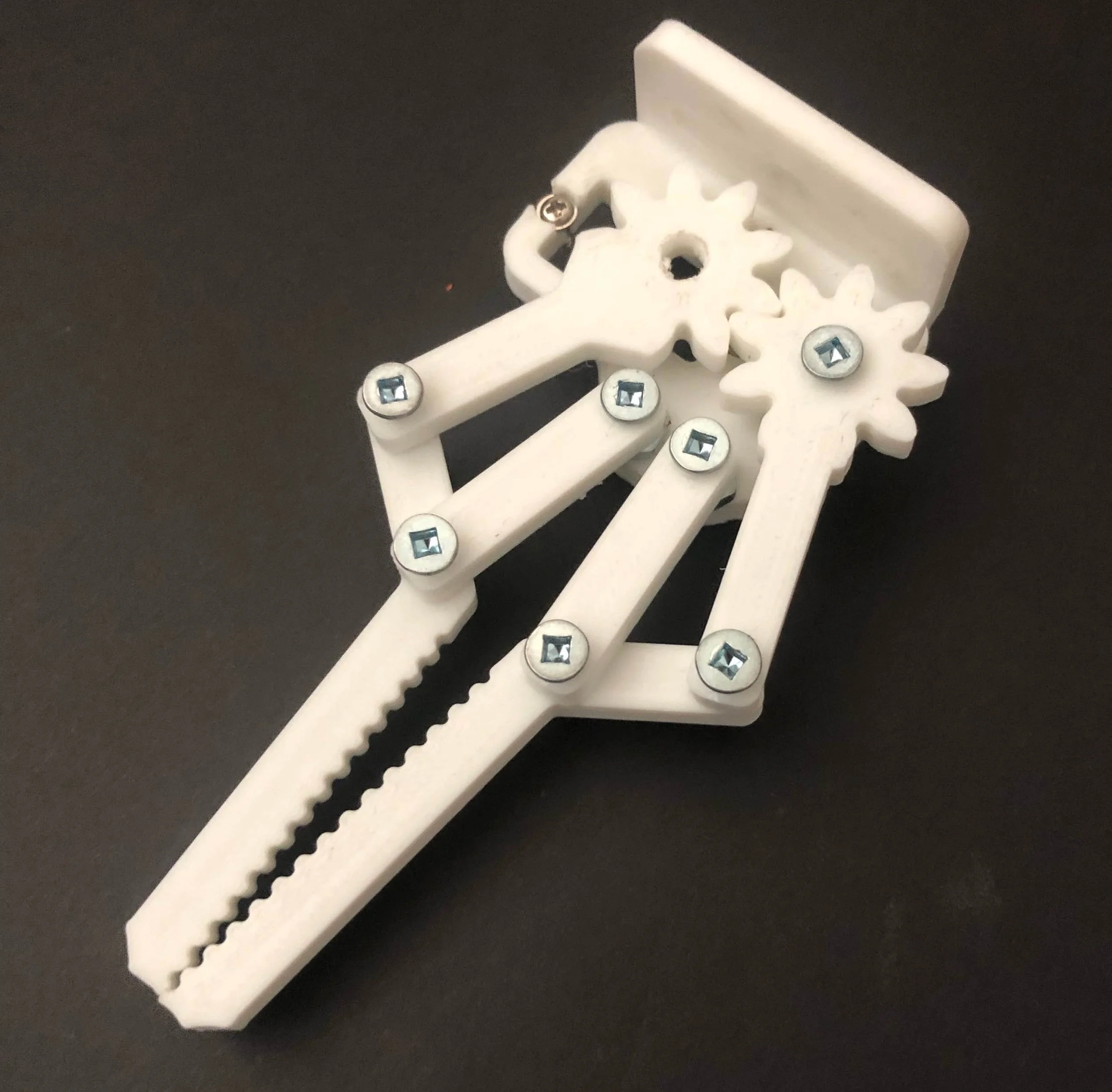
Modelled a 4-bar linkage claw to manipulate objects
Premise
The aim of this project was to design a robotic arm that mimics the movements of a secondary controlling arm.
Though programmed movements can provide precise control, I wanted to explore how intuitive human input could bridge the gap in controlling complex systems.
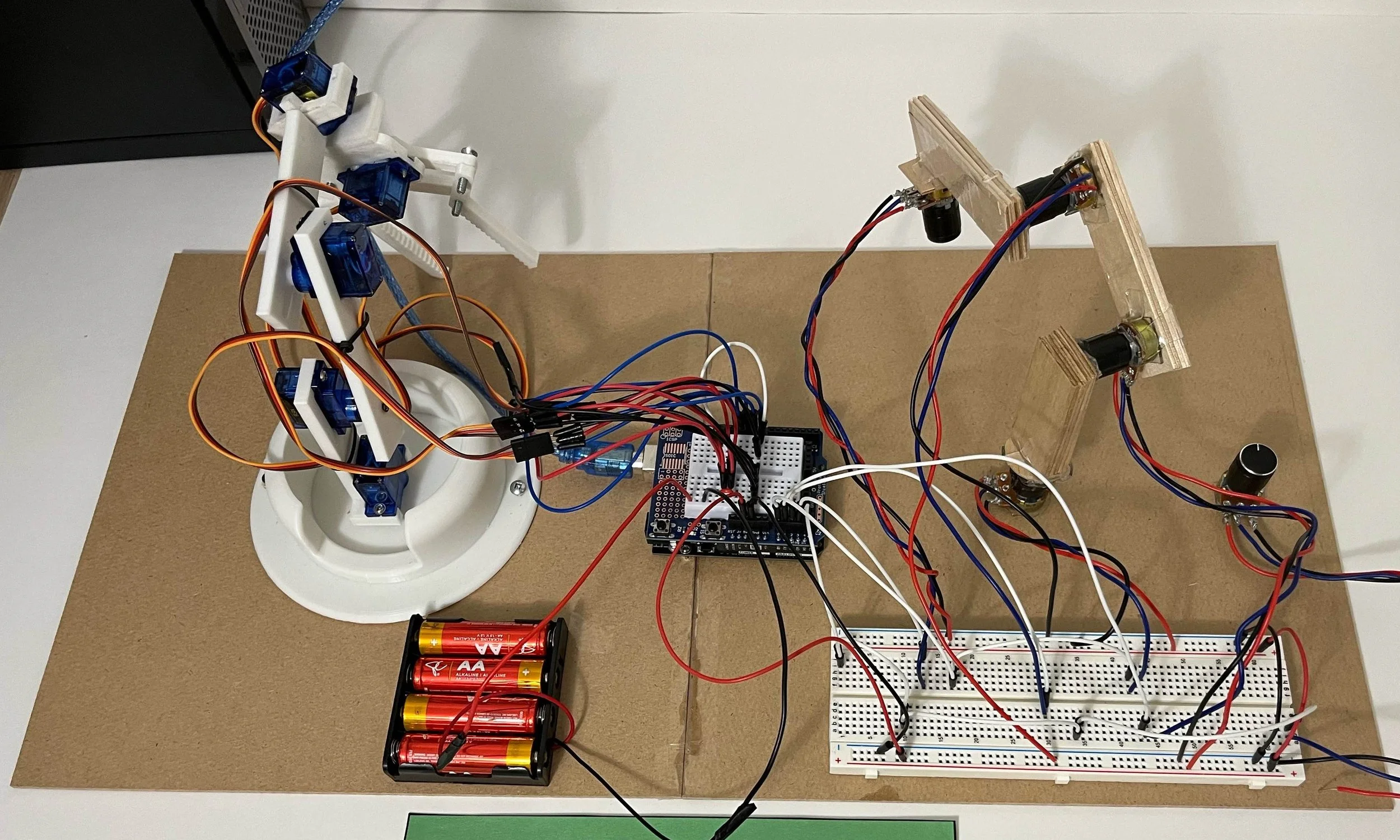
Main Robotic Arm Design
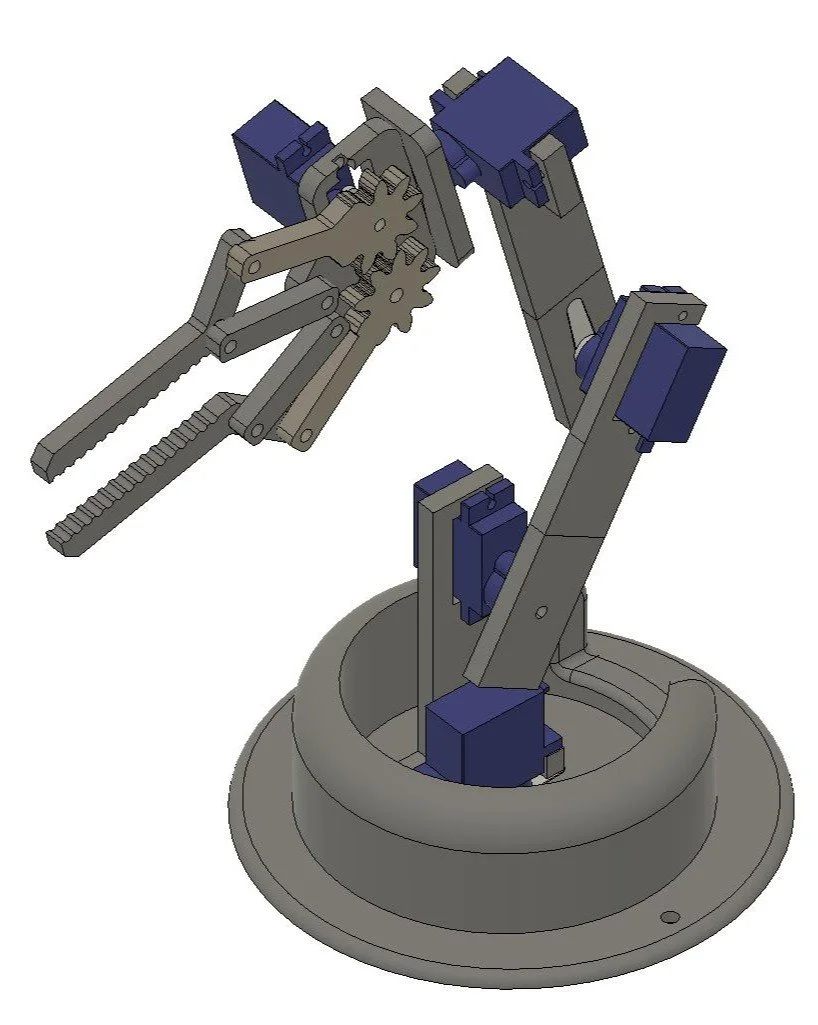
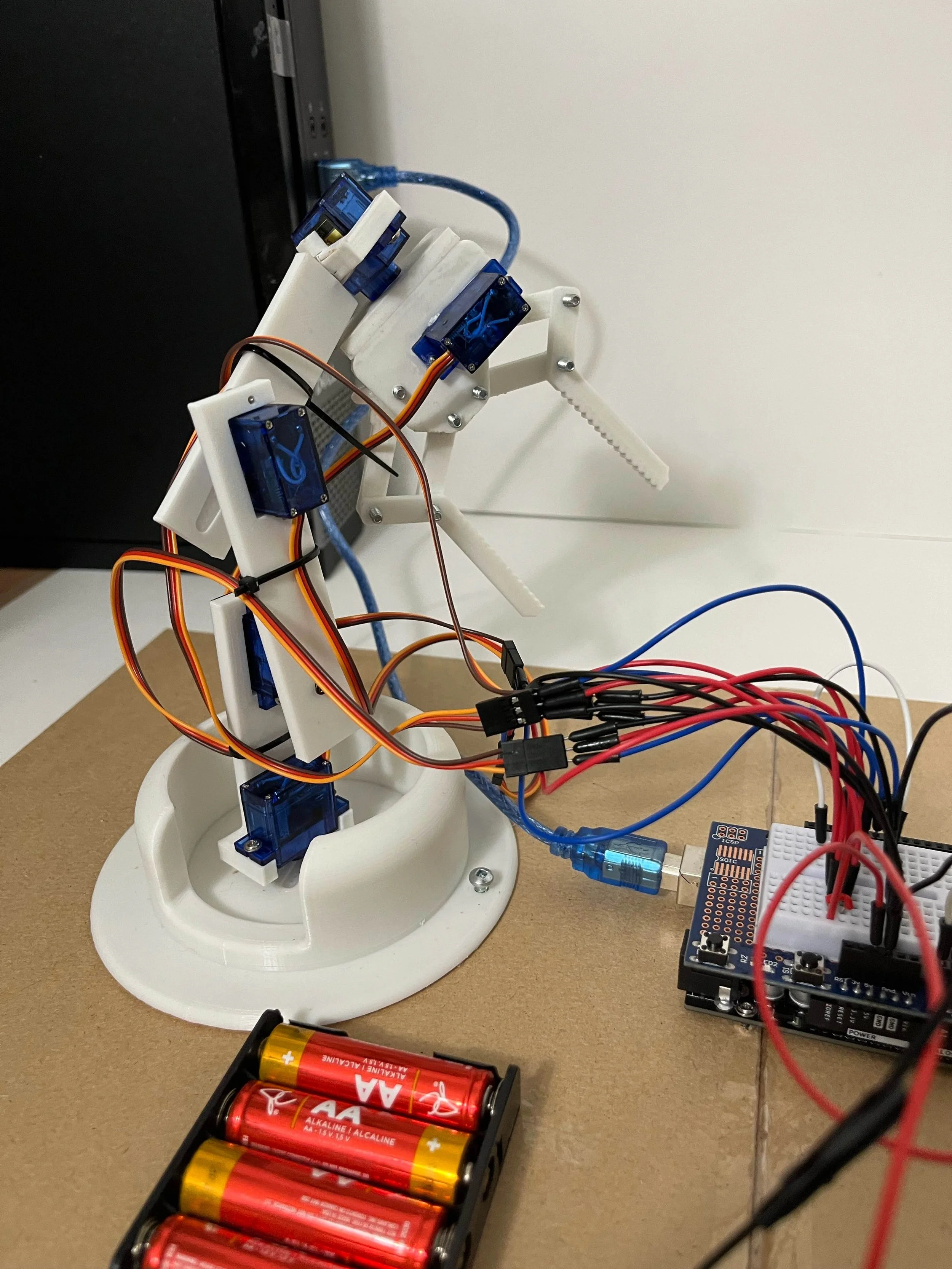
For the main robotic arm, I chose to create a 5-axis design that utilized 5 SG90 servo motors. For the end defector of the robot, I designed a 4-bar linkage claw to manipulate objects. The claw was driven by a servo motor rotating one of the gears, which would result in the gripping motion of the end defector.

The body of the robotic arm consisted of rectangular pieces, where one end mounted to the body of a servo motor, and the other mounted to the shaft of the next motor. This design, though not the most robust, was chosen to minimize material (and thus cost) as much as possible due to constraints.

Control Arm Design
The control arm had a very “frugal” design, using purely scrap wooden pieces. These wooden pieces were assembled to match the design of the main robotic arm. Connecting each piece was a potentiometer.
These potentiometers were how the movements on the main arm were mimicked. With all of the servo motors and potentiometers wired to the Arduino, after writing some code, any movement in the potentiometers were matched by the motors.
Reflection and Improvements
While the system achieved its intended functionality, it fell short of the performance I envisioned. Reflecting on the project, I recognize key areas for improvement and what I would approach differently if I were to redo it.
With a larger budget, I would have invested in stronger motors. The current design relied on SG90 motors, which struggled to handle the weight of the robotic arm, especially at the base. This resulted in slower, less responsive movements. Upgrading to higher torque motors would have significantly enhanced both speed and reliability.
Additionally, I would optimize the main arm’s design. My focus on minimizing material use led to a structure that was neither aesthetically pleasing nor adequately supported. With better resources, I could have developed a design that balances functionality, durability, and appearance.
Though this project may not be perfect, looing back, it shows how much I have grown from the start of my engineering journey, to now. Nothing is more important than improvement.